
The Flesh is a Prototype // Upgrade Your Chassis
Every tool humanity has ever built has been a compromise—a temporary crutch held in a fragile hand. Together, let's design 3D-printed carbon arrays to conquer mountains and compile microcontrollers to bypass fatigue. Let's go beyond strapping brilliant engineering to a soft, decaying envelope of skin and fat. We allow clothing, straps, and friction to limit the processing speed of our intent.
We are looking for more than spectators, code-reviewers, and makers within the 3D print community. We are calling for the pioneers willing to cross the threshold. This isn't Cosplay, this is real world body modification. We need operators to undergo elective, biocompatible modification—to anchor hardware straight to bone and embed circuits beneath the skin.
Whether born man or woman, your birth specs are merely a baseline. True evolution doesn't look like millions of years of passive biological drift; it looks like a clean surgical environment, an open-source schematic, and the deliberate courage to transcend what you were born to be capable of. Do not just build the architecture. Become the framework! Let's start the new era of humanity.
Division 01: Microcontrollers & Firmware Architectures
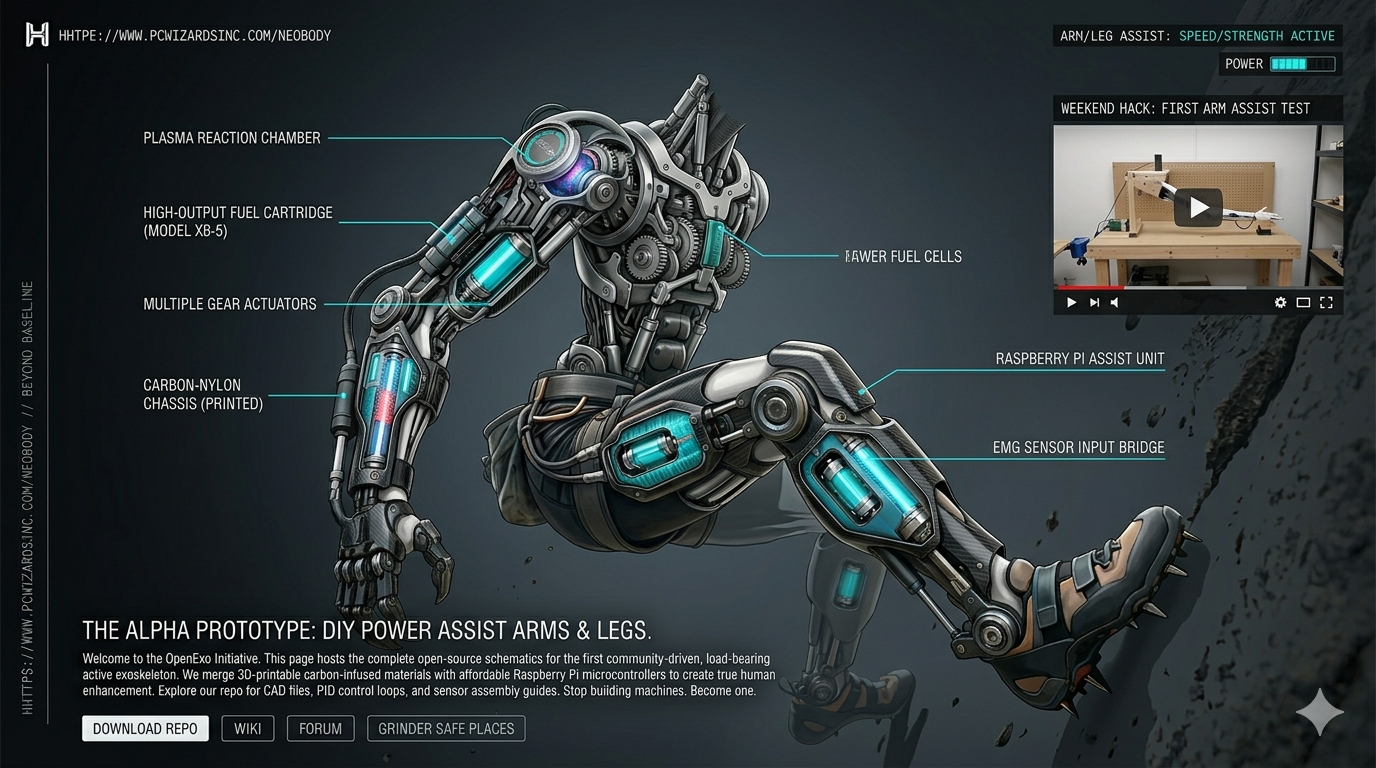
Tracking Status: Active Loop DevelopmentWe need active routing - real-time low-latency motor control paths using off-the-shelf development units. The core challenge is syncing sensory feedback with high-torque hardware output to minimize tracking delay.
Deployment Stack: We utilize the Raspberry Pi Pico series or an ESP32 configuration running a custom real-time loop layer to process muscle contraction data.
The standard active control structure registers input arrays through standard surface or muscle-implantable sensors:
# Example real-time motor assist sequence
import time
from machine import Pin, ADC, PWM
muscle_sensor = ADC(Pin(26))
motor = PWM(Pin(15))
motor.freq(20000) # Maintain switching to mitigate audible motor hum
while True:
load_factor = muscle_sensor.read_u16()
if load_factor > 30000:
motor.duty_u16(45000) # Execute hardware torque assist acceleration path
else:
motor.duty_u16(0) # Drop into static coast orientation
time.sleep_ms(5)
Division 02: Manufacturing & Mechanical Frameworks
Tracking Status: Parametric STL Beta TestsStandard printing profiles fail immediately under active load stress. The Structural Forge focuses completely on load-bearing components engineered for field durability during climbing and trail courses.
Slicing & Filament Guidelines:
- Base Material Choice: Carbon Fiber-infused Epoxy substrate
PA-CFor heavy dutyPETG. Never deploy components utilizing standard PLA or cosmetic polymers. - Infill Architecture: 65% infill density. Grid and linear infills create systemic shear vulnerabilities under mechanical torsion.
- Wall Parameters: Alloy walls to ensure torque distribution across the outer faces of the structure.
Files can be found in the asset directory.
Division 03: Invasive Systems & Human-Machine Interfaces
Status: Long-Term BlueprintingExternal harnesses suffer from friction loss, skin compression, and soft tissue shift. True systems performance requires moving past external straps and routing hardware paths beneath the envelope of the skin.
System Interfaces Under Documentation:
- Subdermal Sensor Integration: Injecting of ceramic harness
IMES(Implantable Myoelectric Sensors) TBD. - Anchoring Arrays: Utilizing direct skeletal adapters passing through the skin barrier to couple carbon-fiber exoskeleton struts directly to bone.
Body-mod friendly practitioners, and regulatory limitations surrounding non-medical modifications.
Your Evolution
The transition from theory and code to flesh requires coordination. We need to share hardware repositories, software, firmware revisions, and secure development options.
Stop building machines. Become one.
Let's start by building a community: It's time to go from science fiction to reality.